Loco Sound API¶
Architecture¶
The architecture of loco sound is wrapped primary around a main loop of a pygame application.
Sound Packet¶
Speed Curve¶
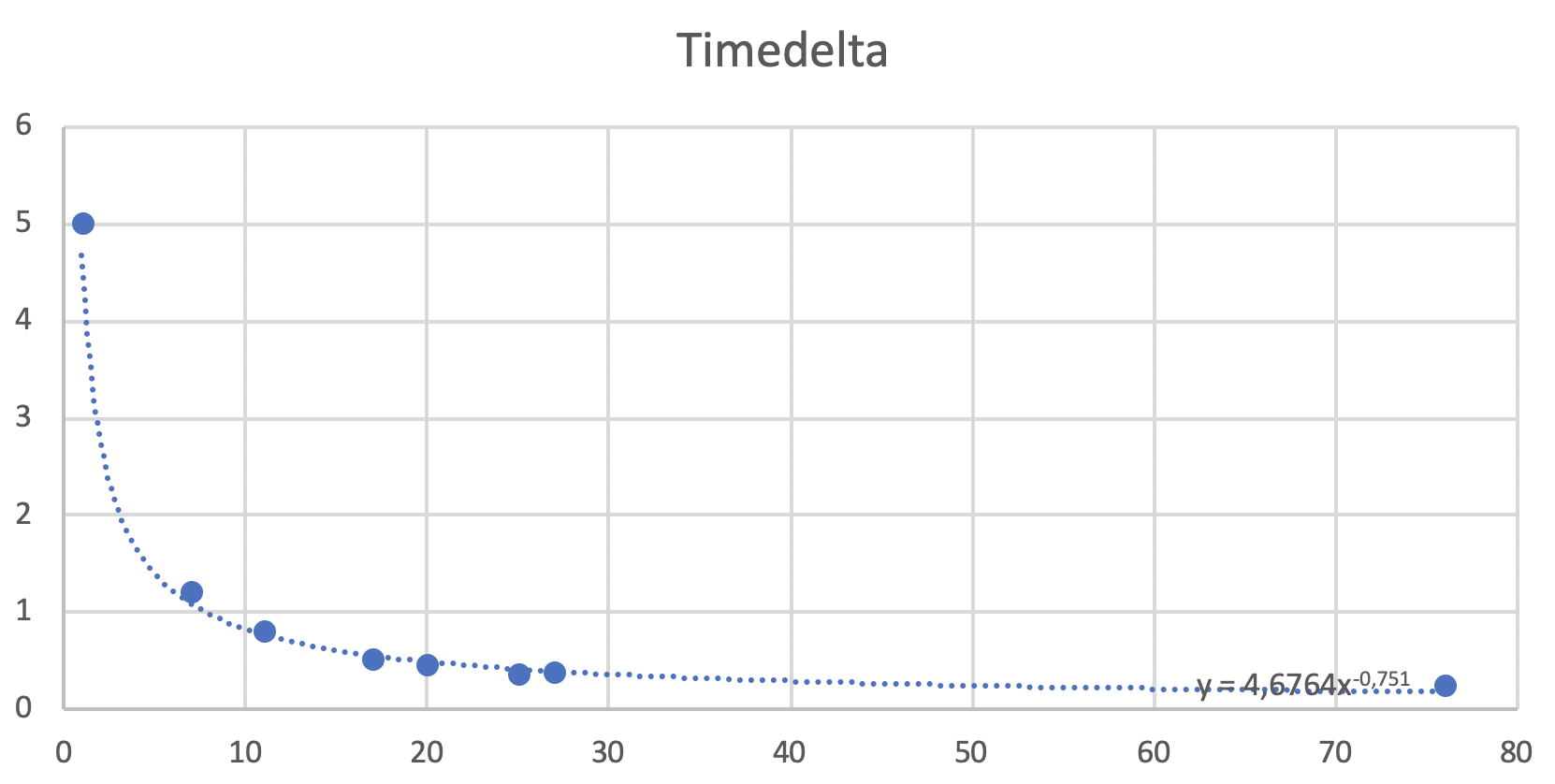
Measured time between cylinder sound time delta and Z21 speed steps.¶
Z21¶
Z21 is a digital platform to control miniature train by the manufacture Roco/Fleischmann.
The LAN specification of the Z21 can be found here.
Sources¶
loco_sound.loco¶
The loco package stores the state of each registered locomotive.
For registration of a locomotive, see loco_sound.loco.LocoCollector.add_locos()
-
class
loco_sound.loco.Loco(loco_number)¶ This class has all the loco logic
- Parameters
loco_number (
int) – The number of the locomotive you want to control.scheduled_function_calls – Scheduled function calls.
-
change_f_0(new_value, old_value, all_functions, *args, **kwargs)¶ Foo
- Parameters
new_value (
bool) – Foo
-
class
loco_sound.loco.SteamLoco(loco_number)¶
-
class
loco_sound.loco.LocoCollector¶ This class maps a
Locoto aSoundPackage, passes updates in form ofLocoInfoto a within a LocoCollector registeredLocoand also checks if some scheduled functions needs to be called. This is necessary on aSteamLoco.
loco_sound.z21¶
The z21 package contains the network communication to the Z21.
-
class
loco_sound.z21.Message(header, x_header=None, db_data=None, xor=None, length=None)¶ Serializes and builds messages for Z21. For serializing see
from_z21_message().See Z21 LAN reference sheet for more information.
- Parameters
header (
bytearray) – Headerx_header (
Optional[int]) – X_headerdb_data (
Optional[bytearray]) – db_dataxor (
Optional[int]) – xor bytelength (
Optional[bytearray]) – 2 length bytes.
-
property
data¶ Builds a byte representation of the message which can be send to Z21.
- Return type
bytearray- Returns
Message as raw bytes.
-
classmethod
from_z21_message(message)¶ Parses a received Z21 message.
- Parameters
message (
bytearray) – Raw byte UDP package received from Z21.
-
class
loco_sound.z21.Client(host='192.168.0.111', port=21105)¶ Handles the communication to the Z21 in both ways via
send_message()andlisten().- Parameters
host (
str) – Hostname of the z21 in your network.port (
int) – Port number of the z21
-
listen()¶ Collects UDP messages which were send to us.
Todo
Maybe marry this properly into the main loop by providing callback
- Return type
Optional[Message]- Returns
If a message is available we will return this as a parsed
Message. If no message is available we will return None.
-
send_message(message)¶ Sends a
Messageto the connected z21.- Parameters
message (
Message) – Message which you want to send.- Return type
None
-
send_welcome()¶ Sends welcome message to z21 so we are a registered client. We do this by asking for the serial number of the z21.
We will call this periodically so we still receive messages from z21 after some time because otherwise we will get logged out as a client.
- Return type
None
-
subscribe_to_all_locos()¶ Sends message so we are subscribed to changes of all locomotives. You need to collect the messages from z21 via
listen().- Return type
None
-
subscribe_to_loco(loco)¶ Subscribes to a single loco for changes. You need to collect the messages from z21 via
listen().Warning
Using this is not recommended because we will receive stacked messages which are not yet supported. This also this limits our application to 15 locos. Use
subscribe_to_all_locos()instead.- Parameters
loco – Loco on which you want to receive changes from.
- Return type
None
-
class
loco_sound.z21.LocoInfo(loco_address, dcc_speed_steps, direction, speed, functions)¶ Serializes locomotive status updates from a received
loco_sound.z21.Message, seefrom_z21_response().- Parameters
loco_address (
int) – Address which caused the informationdcc_speed_steps (
int) – Speed steps of the locodirection (
int) – Driving direction of the loco. 0 for backwards, 1 for forwards.speed (
int) – speed step which was send - will be absolute so please compare withdcc_speed_stepsfor relative speed.functions (
Dict[int,bool]) – Stores a dict of which informations are selected and which are currently not selected.
-
classmethod
from_z21_response(message)¶ Serializes a
loco_sound.z21.Message- Parameters
message (
Message) – Message which you want to serialize.